Concevoir des drones capables de voler dans des conduits d’aération
Un nouvel article publié dans npj Robotics relève le défi de faire voler de petits quadrirotors dans des conduits d’aération d’un diamètre maximal de 35 cm. Cette recherche, menée par une équipe de chercheurs d’Inria, du CNRS, de l’Université de Lorraine et d’Aix-Marseille Université, ouvre un nouveau champ des possibles relatif à l’accessibilité et à l’inspection d’environnements confinés.
Conduits d’aération : un enjeu contemporain pour les inspections de sécurité
Bien qu’omniprésents dans les bâtiments modernes et les réseaux souterrains, les conduits d’aération restent difficiles à inspecter en raison de leur inaccessibilité. Leur étroitesse et leur incapacité à supporter le poids d’une personne rendent impossibles les interventions essentielles à la maintenance de la qualité de l’air, du chauffage et de la climatisation.En raison de leur capacité à naviguer à la fois horizontalement et verticalement, les petits drones quadrirotors offrent une solution potentielle à l’exploration de ces conduits d’aération. Cependant, ces drones créent des flux d’air qui circulent à l’intérieur du conduit et déstabilisent le drone, créant d’importantes turbulences dans un environnement qui offre peu de place à l’erreur.
Cartographier les forces aérodynamiques dans un conduit d’aération circulaire
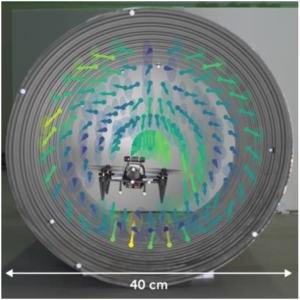
Dans un premier temps, l’équipe a étudié la façon dont l’air circule en fonction de la position du drone dans le conduit d’aération. Pour ce faire, un bras robotique et un capteur de force et de couple ont été utilisés pour mesurer les forces selon des centaines de positions. Cette première « carte » des forces souligne un schéma aérodynamique complexe et permet l’identification des zones « dangereuses » des conduits circulaires, où les courants de recirculation poussent le drone vers les parois, et d’une position plus sûre, où les forces générées s’annulent.
Faire voler et planer un petit quadrirotor dans des petits conduits d’aération
Pour maintenir sa position au point recommandé, le drone doit être capable d’identifier sa position actuelle dans un environnement généralement sombre et marqué par le manque de repères visuels. L’équipe de recherche a combiné de petits lasers et l’intelligence artificielle (un réseau neuronal entrainé sur des données de capture de mouvement) pour permettre au petit drone de rester à l’endroit où les turbulences sont les plus faibles, ce qui lui permet de voler de manière plus sûre et stable.
Un pas vers de nouveaux domaines d’application
Les résultats de cette recherche ouvrent de nouveaux domaines d’application prometteurs pour les drones dans les domaines de l’inspection industrielle et de la sécurité publique. La prochaine étape consistera à développer un prototype plus orienté vers des applications comprenant des charges utiles telles que des caméras, des caméras thermiques ou des capteurs de gaz.
Un projet collaboratif à grande échelle
Cette recherche a été menée par Jean-Baptiste Mouret, directeur de recherche Inria, et Thomas Martin, doctorant, tous deux membres de l’équipe HUCEBOT, commune au Loria – Laboratoire lorrain de recherche en informatique et ses applications (CNRS, Université de Lorraine) et au Centre Inria de l’Université de Lorraine. Ce travail est le fruit d’une collaboration avec l’Institut des sciences du mouvement – Etienne-Jules Marey (Aix-Marseille Université/CNRS) et le Laboratoire de conception, fabrication, commande (Université de Lorraine). Il reflète la force des partenariats entre des institutions françaises que sont Inria, le CNRS, l’Université de Lorraine et Aix- Marseille Université.
Le projet en images



Ressources complémentaires
- Article scientifique : Flying in air ducts.
Citation : Thomas Martin, Adrien Guénard, Vladislav Tempez, Lucien Renaud, Thibaut Raharijaona, Franck Ruffier & Jean-Baptiste Mouret.
Flying in air ducts. npj Robotics 3, 16 (2025). - Lire le communiqué de presse : Concevoir des drones capables de voler dans des conduits d’aération (.pdf, 238,76 Ko).
Source : inria.fr

